Identification d'un second ordre oscillant
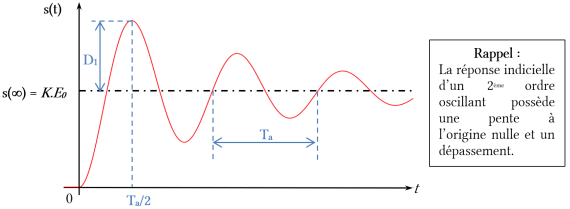
Un système du second ordre en régime pseudo-périodique (oscillant) possède une fonction de transfert de la forme :
 avec
avec
 .
.
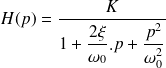
La réponse à un échelon d'amplitude
 d'un tel système a l'allure suivante :
d'un tel système a l'allure suivante :
Le gain statique K peut être déterminé en relevant la valeur finale :

Le coefficient d'amortissement
 peut être déterminé en relevant le premier dépassement :
peut être déterminé en relevant le premier dépassement :
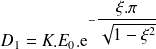 ou de préférence avec le premier dépassement relatif :
ou de préférence avec le premier dépassement relatif :
 .
. En effet, connaissant
 , il vient :
, il vient :
La pulsation propre du système non amorti
 peut être déterminée en relevant la pseudo-période
peut être déterminée en relevant la pseudo-période
 ou bien le temps de premier dépassement
ou bien le temps de premier dépassement
 (avec
(avec
 ) :
) : donc
donc
 ou encore
ou encore
La pulsation propre peut aussi être déterminée grâce à l'abaque des temps de réponse à 5% réduits. Il convient de relever
 expérimentalement et de connaître
.
expérimentalement et de connaître
.
Une fois les caractéristiques déterminées, il convient de tracer la réponse théorique et de la comparer à la courbe expérimentale afin de valider le modèle choisi.
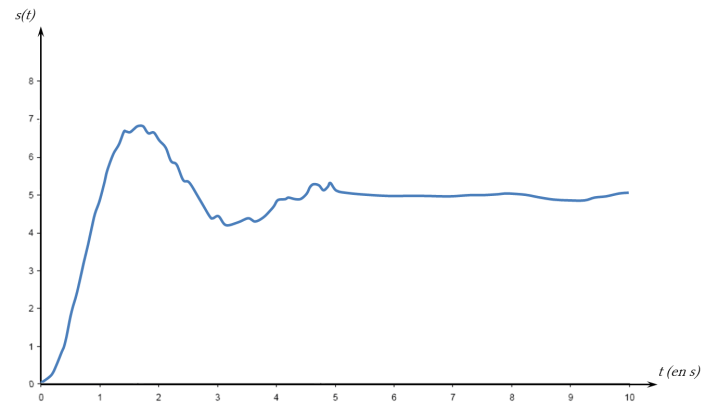
Exemple :
Déterminer les caractéristiques de la fonction de transfert du système suivant, dont la réponse expérimentale à une entrée en échelon d'amplitude 2,5
 est donnée ci-dessous :
est donnée ci-dessous :