


Système du second ordre
Fondamental :
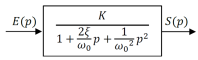
Un système physique d'entrée e(t) et de sortie s(t) est du 2ème ordre, s'il est régi par une équation différentielle du second ordre à coefficients constants du type :
|  |


Si les conditions initiales sont nulles (
 et
et
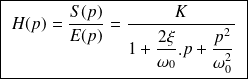
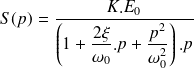
 ), la fonction de transfert sous forme canonique s'écrit:
), la fonction de transfert sous forme canonique s'écrit:
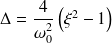
Le discriminant du dénominateur vaut :
Donc les pôles de la fonction de transfert (=racines du dénominateur) dépendent de la valeur du coefficient d'amortissement
 . Trois cas sont à envisager :
. Trois cas sont à envisager :


Valeur de
| Expression des pôles |
|---|---|
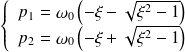
Régime apériodique (système amorti) | 2 pôles réels :
|
Régime apériodique critique (amortissement critique) | 1 pôle double :
|
Régime pseudo-périodique (système sous-amorti ou oscillant) | 2 pôles complexes conjugués (à partie réelle négative)
|





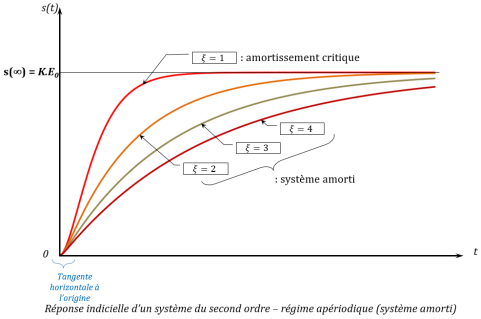
Réponse indicielle
L'entrée est définie par un échelon d'amplitude
 :
:

La sortie a donc pour expression dans le domaine de Laplace :

Pour déterminer la réponse temporelle
 il faut décomposer la fraction rationnelle ci-dessus en éléments simples. Or cette décomposition diffère selon la valeur des pôles de la fonction de transfert.
il faut décomposer la fraction rationnelle ci-dessus en éléments simples. Or cette décomposition diffère selon la valeur des pôles de la fonction de transfert.
On distingue donc 3 régimes de fonctionnement correspondant à des pôles réels, complexes ou à un pôle double. Toutefois, certaines caractéristiques sont communes à ces 3 régimes de fonctionnement. Elles sont données ci-après.
Caractéristiques communes à tous les régimes de fonctionnement
Valeur finale : ordonnée en
 :
:

Tangente à l'origine :
![s'(0^+)= \underbrace{\lim\limits_{t\rightarrow 0^+ } \, s'(t) =\lim\limits_{p\rightarrow +\infty } \,p.\left[p.S(p)\right]}_{\text{Théorème de la valeur initiale}}=\lim\limits_{p\rightarrow +\infty } \,p^2.\frac{K.E_0.\omega_0^2}{(p^2+2.\xi.\omega_0.p+\omega_0^2).p}=0](../res/2e_ordre_pente.png)
Erreur statique:
![\varepsilon_S= \varepsilon(+\infty)= \lim\limits_{t\rightarrow +\infty } \left[ \, e(t)-s(t) \, \right] =\lim\limits_{p\rightarrow 0^+ } p.\left[ \, \frac {E_0} p - \frac K {1+\frac{2\xi}{\omega_0}.p+\frac{p^2}{\omega_0^2}}.\frac{E_0}p \, \right] =E_0.(1-K)](../res/2e_ordre_erreur.png)
Remarque :
Le régime permanent ne dépend que du gain
 et de l'amplitude de l'échelon d'entrée
. Il ne dépend ni du coefficient d'amortissement ni de la pulsation propre.
et de l'amplitude de l'échelon d'entrée
. Il ne dépend ni du coefficient d'amortissement ni de la pulsation propre.La tangente à l'origine est horizontale, ce qui diffère de la réponse indicielle des systèmes du premier ordre.
Régime apériodique (système amorti) : ξ>1
Si
 , la fonction de transfert possède deux pôles réels
, la fonction de transfert possède deux pôles réels
 et
et
 tels que :
tels que :
La décomposition en éléments simples s'écrit alors :
 avec
avec
Ainsi,

En utilisant la transformée de Laplace inverse, on trouve :

Enfin, posant
 et
et
 , et en en utilisant le fait que
, et en en utilisant le fait que
 , on trouve :
, on trouve :
![\boxed{\quad s(t)=K.E_0.\left[1-\frac 1 {\tau_1-\tau_2}.\left( \tau_1. \text e^{-\frac t {\tau_1}}-\tau_2. \text e^{-\frac t {\tau_2}}\right) \right].u(t)\quad }](../res/2e_ordre_amorti.png)
Complément : Notion de pôle dominant
Dans le cas
, la fonction de transfert admet donc deux racines réelles et peut également s'écrire, en utilisant la forme suivante :
Dans le cas où
 , il est possible de négliger le terme
, il est possible de négliger le terme
 devant
devant
 et d'approcher la fonction de transfert par celle d'un premier ordre.
et d'approcher la fonction de transfert par celle d'un premier ordre.
Le pôle
correspond dans ce cas au pôle dominant de la FTBF (celui correspondant à la plus grande constante de temps).
Régime apériodique critique (amortissement critique) : ξ=1
La fonction de transfert admet dans ce cas un pôle double :

La décomposition en éléments simples s'écrit alors :
 avec
avec
La transformée de Laplace inverse donne :

La forme de cette réponse est proche de la précédente mais sa rapidité (
 ) est meilleure. Le régime apériodique critique donne la réponse la plus rapide sans dépassement de la valeur finale.
) est meilleure. Le régime apériodique critique donne la réponse la plus rapide sans dépassement de la valeur finale.
Régime pseudo-périodique (système sous-amorti) : ξ<1
Si
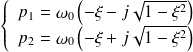
 , la fonction de transfert possède deux pôles complexes conjugués
et
tels que :
, la fonction de transfert possède deux pôles complexes conjugués
et
tels que :
La sortie dans le domaine de Laplace s'écrit :
On peut alors utiliser directement le "tableau" des transformées de Laplace pour déterminer la transformée inverse et obtenir l'expression de la sortie dans le domaine temporel s(t) :

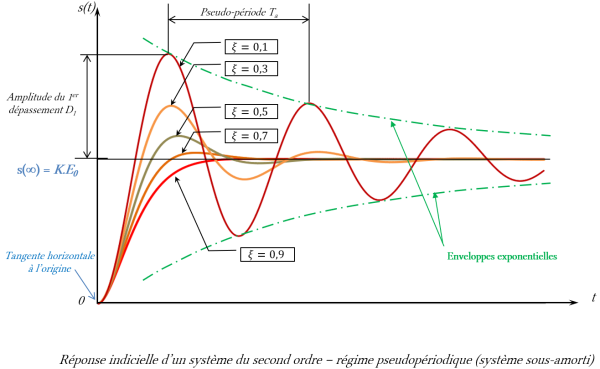
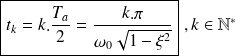
Pseudo-période :
La réponse présente des oscillations amorties dont la période, appelée pseudo-période, est :

Dépassements :
Les dépassements d’amplitude
 apparaissent aux instants :
apparaissent aux instants :
Les dépassements relatifs
 se calculent :
se calculent :
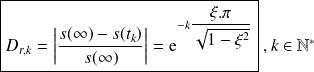
On peut remarquer que les dépassements relatifs ne dépendent que du coefficient d'amortissement.
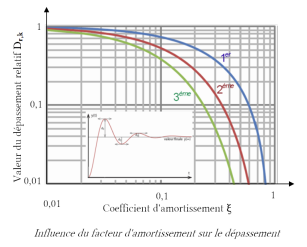
Conseil : A savoir redémontrer rapidement ou à apprendre :
![\forall \xi\in ]0,1[, \, \forall k\in \mathbb N^*\quad D_{r,k}=\text e ^{-k\frac {\xi.\pi}{\sqrt{1-\xi^2}}} \quad \Leftrightarrow \quad \boxed{\xi=\sqrt{\frac {(\ln D_{r,k})^2}{(k.\pi)^2+(\ln D_{r,k})^2}}}](../res/xi_et_depass.png)
Temps de réponse à 5%
:
Il n'existe pas de formule simple pour calculer le temps de réponse à 5% car il dépend de la valeur du coefficient d'amortissement
et de la pulsation propre non amortie du système
 .
.
On utilise plutôt l'abaque donné ci-dessous qui donne la valeur du temps de réponse réduit
 en fonction du coefficient d'amortissement
.
en fonction du coefficient d'amortissement
.
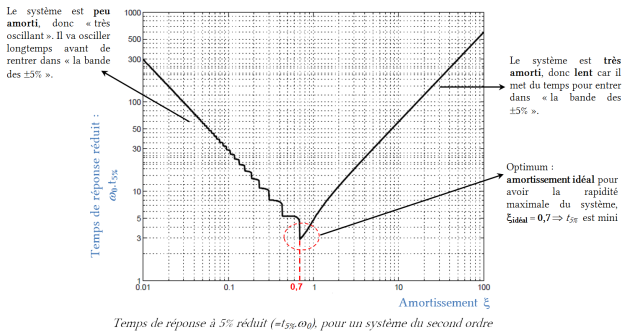
Fondamental :
D'après l'abaque, le temps de réponse à 5% minimum est obtenue pour
 .
.
Pour
 , on a
, on a
 d'où
d'où





